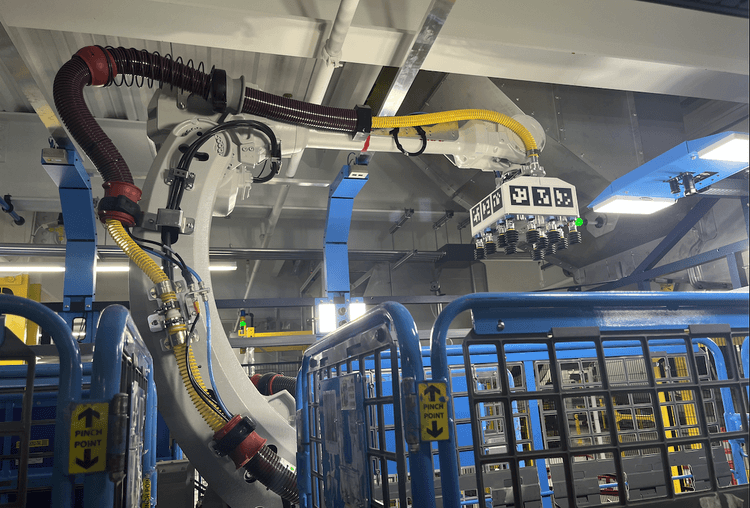
Amazon Robotics Hardware Engineering Intern
IndustryDesign analysis of electrical and pneumatic components on the Sparrow robot.
Electronics
Design analysis of electrical and pneumatic components on the Sparrow robot.
Robot that flips tennis bottles
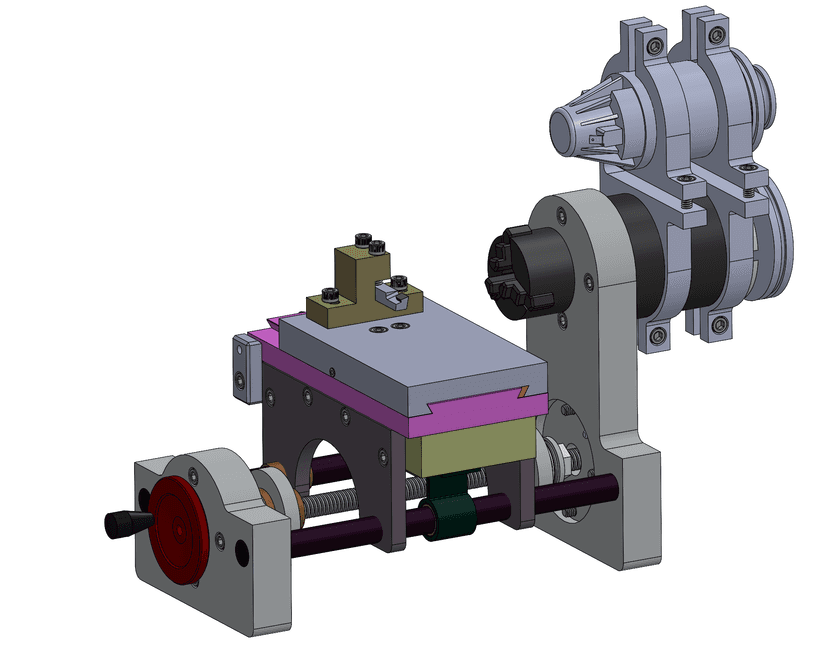
Design & Manufacturing of a CNC lathe with 50-micron repeatability.
Modeled & Design a gripper that could pick up an egg without cracking it.
Robot that walks like how humans walk on crutches
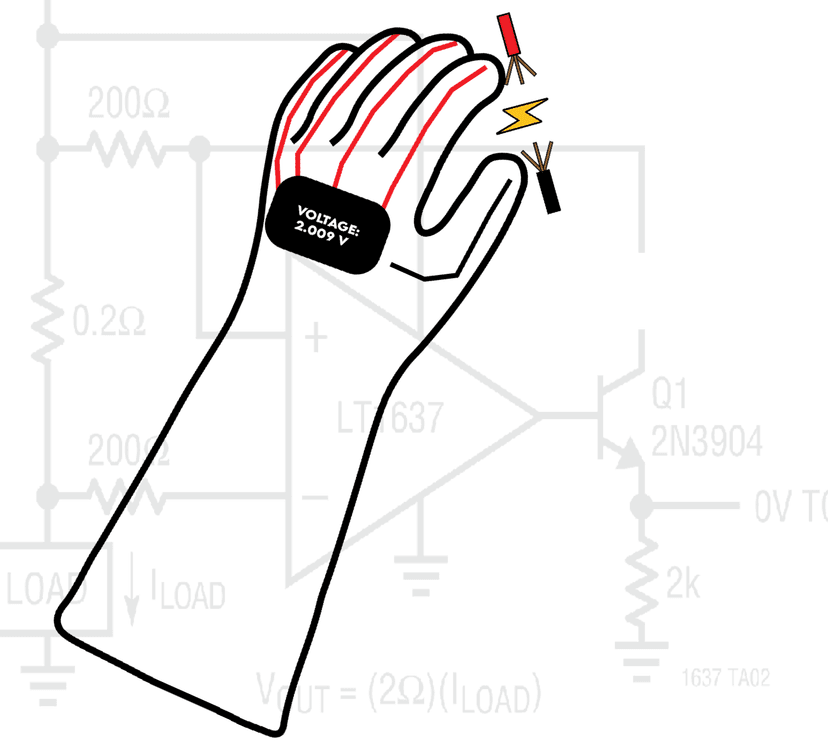
Wearable Multimeter
Design of a compliant precision sensing device to measure the displacement and output force of engineered muscle tissue contractions.
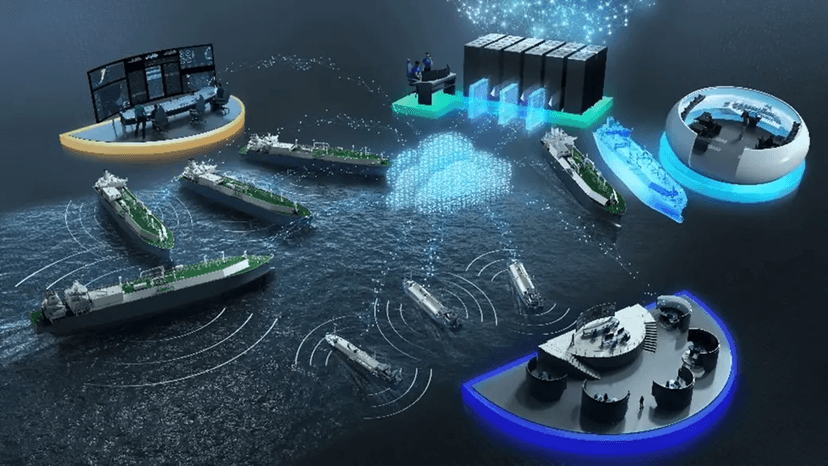
Developed control algorithms for an autonomous ferry route.
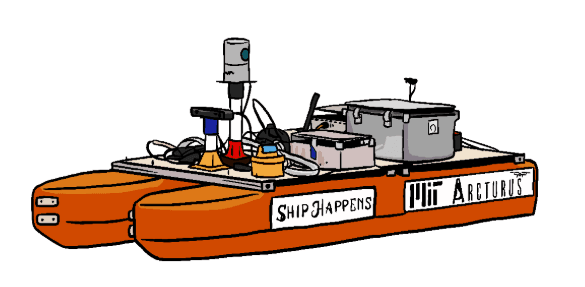
Sensors lead for MIT's autonomous robotics competition team (Arcturus)
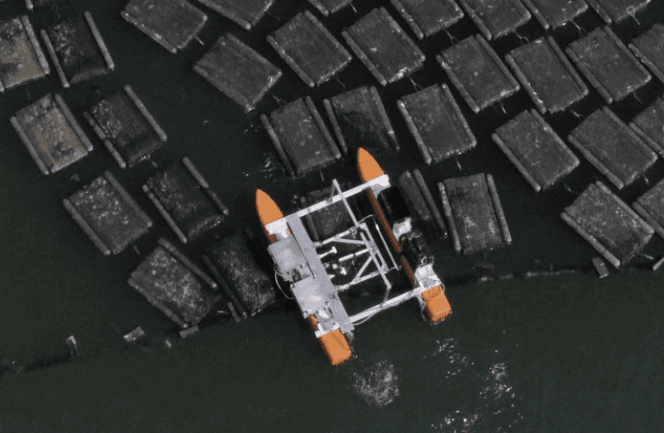
Research project to automate the flipping of oyster bags for oyster farmers working on aquaculture farms

2023 team captain, Most Inspirational Player
Development of a robot to locate, pick up, and deliver an AED to a drop-off point.

Developed a web application to track data for the Rolls Royce Experimental Vibrations Analysis team. Aided in model training to predict surges in aircraft engines.
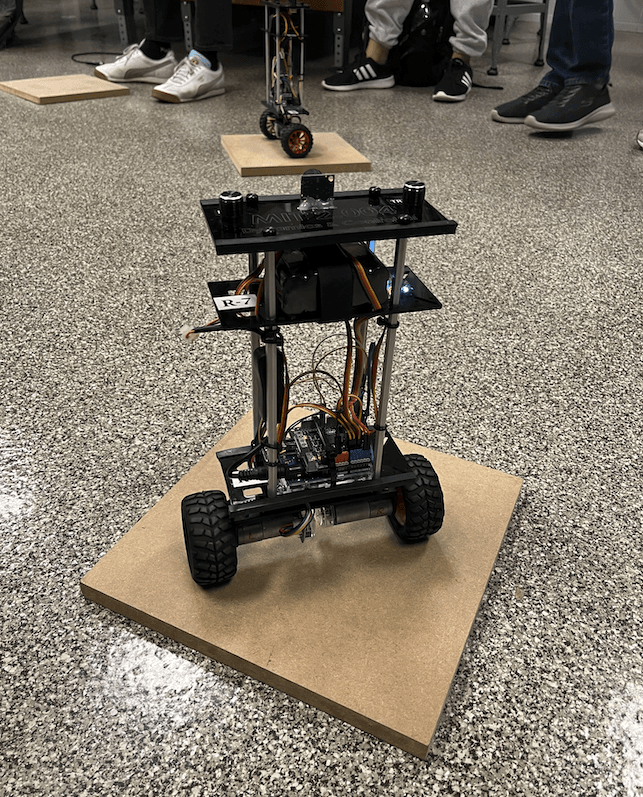
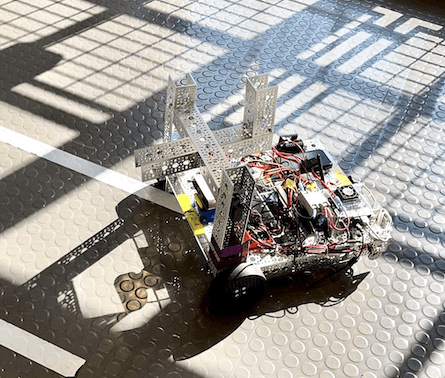
Designed a controller to balance a robot on two wheels, similar to a Segway scooter.
Optimization of ship hull designs & ship cargo placement
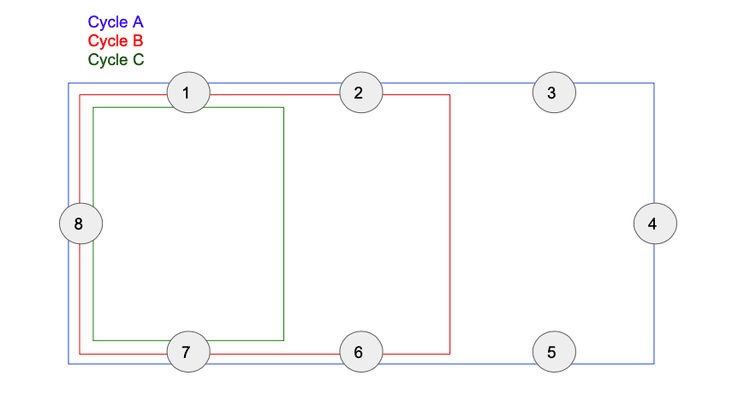
Python project using breadth-first-search to find optimal power flow through ship components.
Designed, manufactured, and presented a product (Nami) that automates water-bottle cleaning.